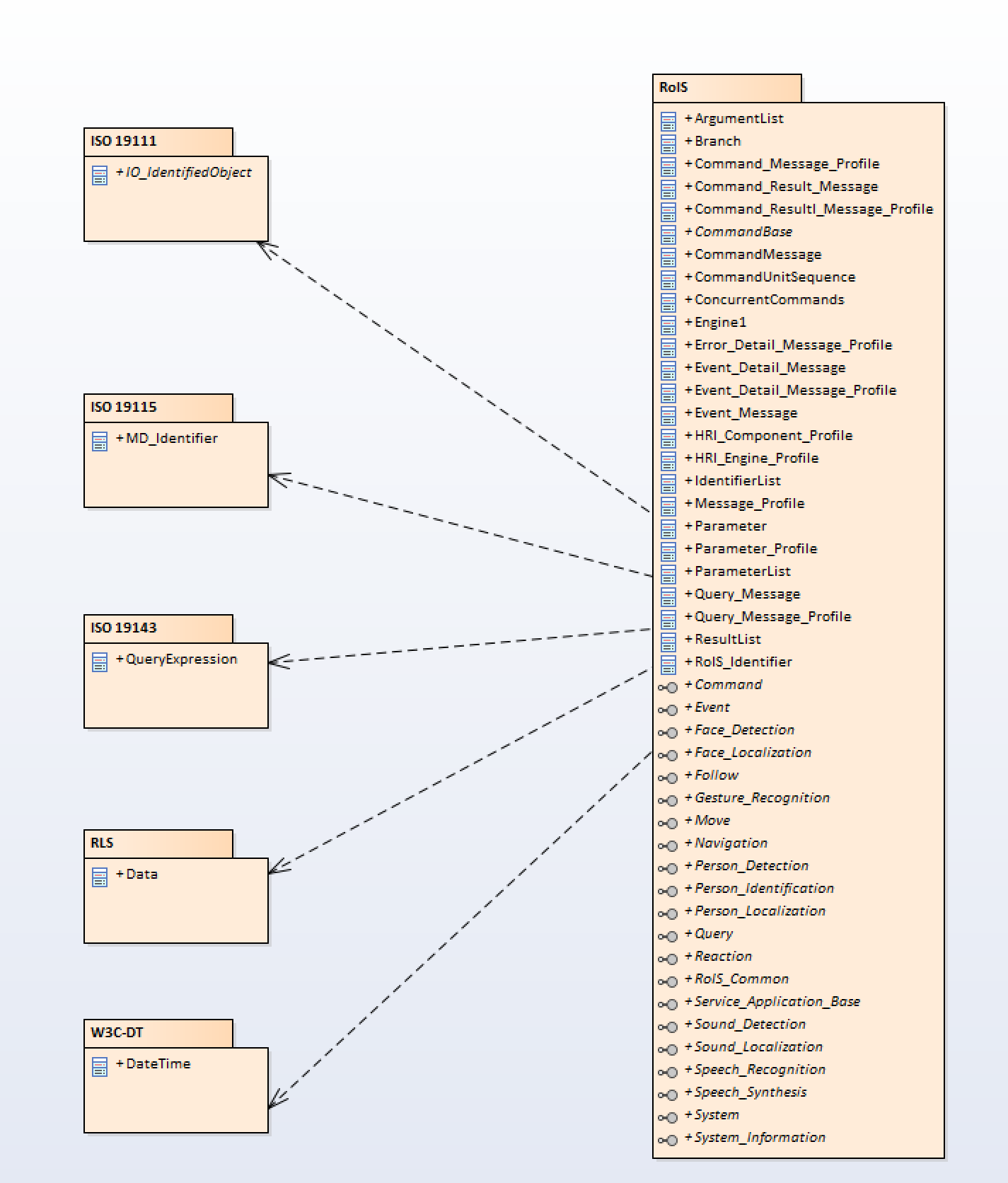
Figure B.1 to be fixed.
-
Key: ROIS2-12
-
Status: closed
-
Source: JARA ( Mr. Koji Kamei)
-
Summary:
Some arrows in Figure B.1 are not aligned to the destination boxes.
-
Reported: RoIS 2.0a1 — Mon, 12 May 2025 11:41 GMT
-
Disposition: Resolved — RoIS 2.0b2
-
Disposition Summary:
*Figure B.1 replaced to align some arrows on the destination boxes. *
Some arrows in Figure B.1 are not aligned to the destination boxes.
-
Updated: Mon, 15 Dec 2025 15:01 GMT
-
Attachments:
- RoIS2-12_FigureB1.svg 14 kB (image/svg+xml)
{kind=link}
{kind=link}
{kind=link}
{kind=link}