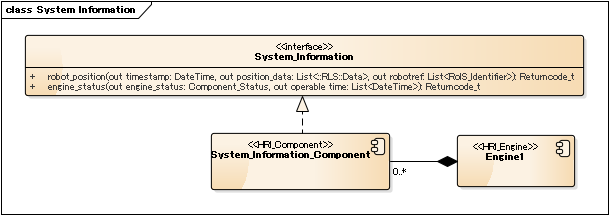
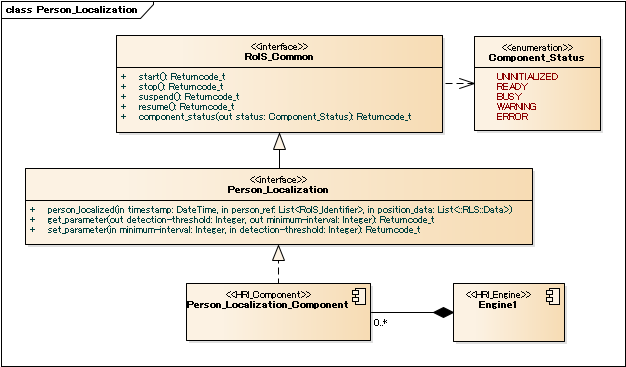
overview Package and UML Class diagram.
-
Key: ROIS11-29
-
Status: closed
-
Source: JARA ( Mr. Koji Kamei)
-
Summary:
The specification would benefit in the future from an overview Package and UML Class diagram [class names only].
Two extra layers of Packages named “RoIS” around the Packages containing real model elements. While strictly speaking not wrong, those extra onion layers look a bit odd.
-
Reported: RoIS 1.0 — Sat, 7 Nov 2015 07:08 GMT
-
Disposition: Deferred — RoIS 1.1
-
Disposition Summary:
This Issue was not resolved in this Task Force and was automatically deferred to the next Task Force
-
Updated: Tue, 12 Jul 2016 14:53 GMT
{kind=link}
{kind=link}