Feature values need to be created for private structural features of parent classifiers
-
Key: FUML12-20
-
Legacy Issue Number: 18529
-
Status: closed
-
Source: Model Driven Solutions ( Mr. Ed Seidewitz)
-
Summary:
Specification: Semantics of a Foundational Subset for Executable UML Models (fUML), v1.1, RTF Beta (ptc/2012-10-18)
Subclause: 8.3.2.2.25 StructuredValueThe StructuredValue::createFeatureValues operation is described to “Create empty feature values for all structural features, direct and inherited, of the types of this structured value.” It does this by iterating through the members of all types of the given structured value, which includes inherited members. Unfortunately, structural values that are private members of parent classifiers are not inherited, but they also need to have feature values created in the structured value.
-
Reported: FUML 1.1 — Tue, 5 Mar 2013 05:00 GMT
-
Disposition: Resolved — FUML 1.2
-
Disposition Summary:
Update StructuredValue
Agreed.
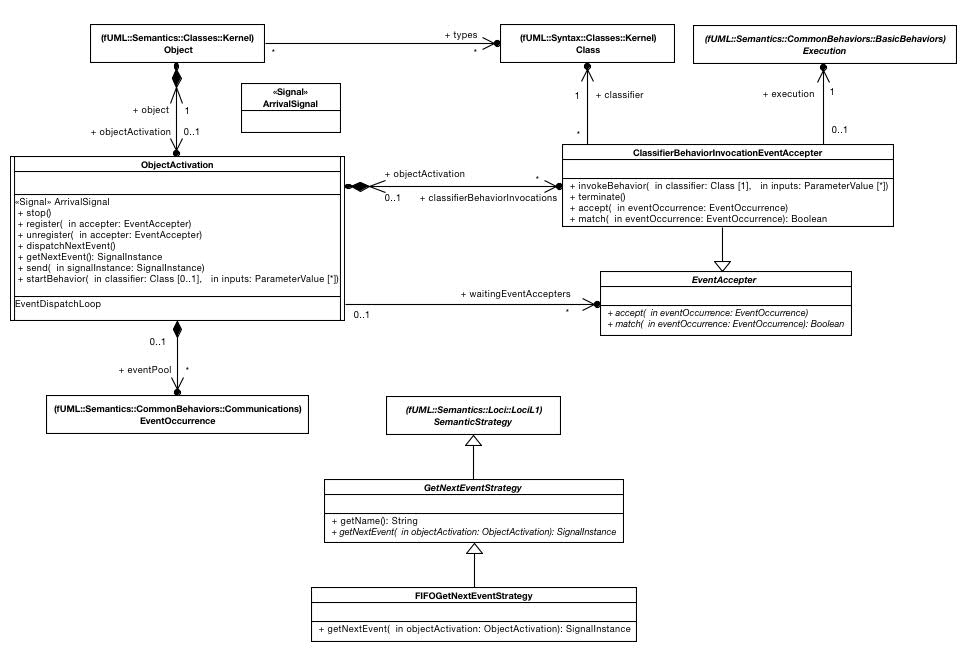
However, in an AcceptEventAction, if isUnmarshall = true, then there are output pins only for the visible members (owned and inherited) of the accepted Signal. Currently, AcceptEventActionActivation places values from all the featureValues of a signal onto the output pins. This needs to be changed to only place the values of visible features onto the output pins.
-
Updated: Tue, 22 Dec 2015 15:09 GMT
{kind=link}
{kind=link}