-
Key: TEX11-10
-
Status: closed
-
Source: BAE SYSTEMS ( Mr. Simon Mettrick)
-
Summary:
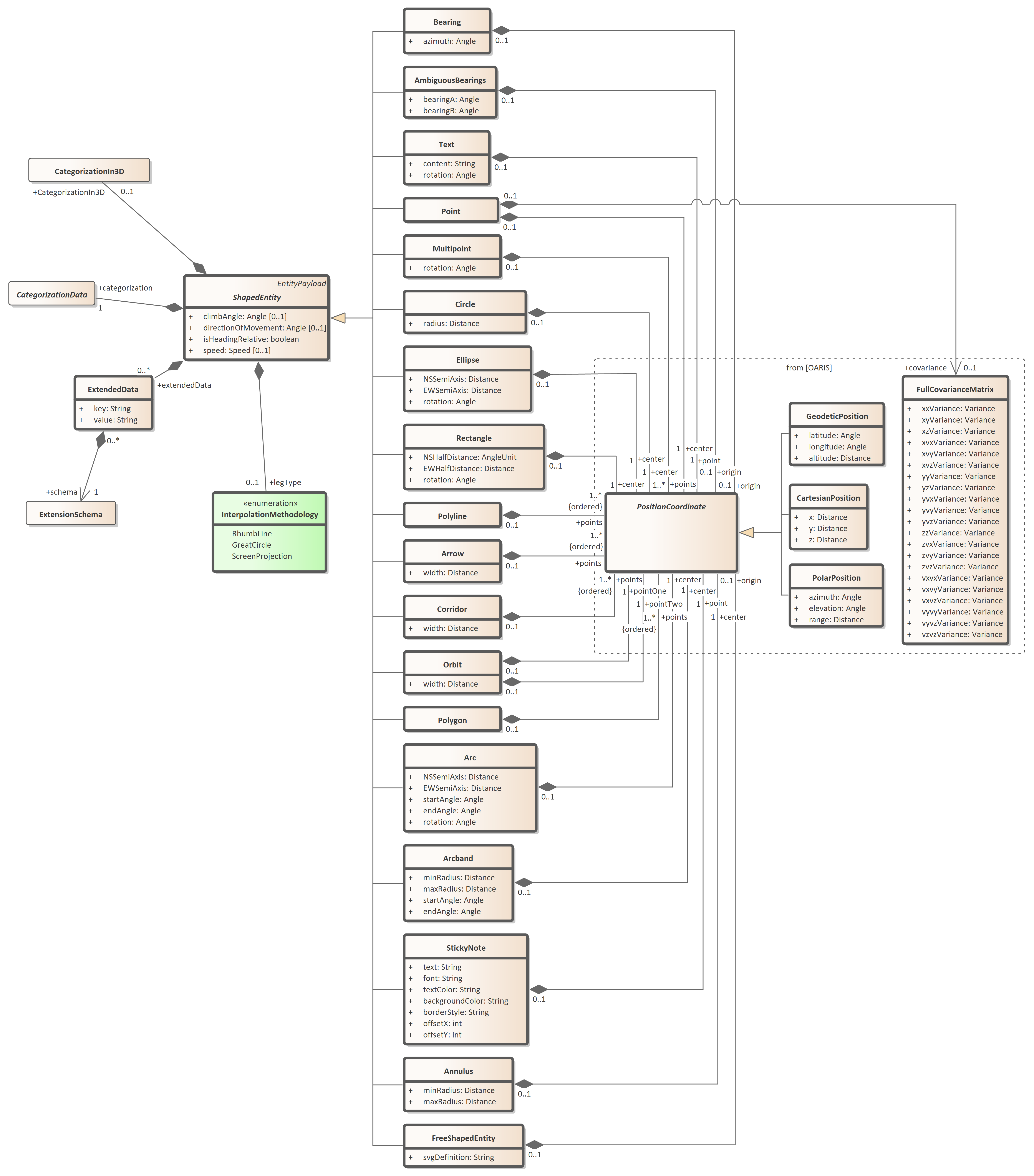
To support tactical decision aid functionality (see www.omg.org/spec/TDAI) and track correlators in particular, TEX entities need to contain uncertainty information as a first-class property; e.g. covariance matrices.
-
Reported: TEX 1.0 — Fri, 13 Jan 2023 13:20 GMT
-
Disposition: Resolved — $issue.fixedSpecification.name
-
Disposition Summary:
Add Optional Covariance to the Point Class
Whilst OARIS provides covariance from sensor tracking, functionality to fuse information from multiple sensor would want to report remaining uncertainty in the fused information using the TEX standard.
This should be an option when defining Point ShapedEntities.
Add a FullCovarianceMatrix class (3D with velocity terms) to the EntityPayload package (as per OARIS 2.0) as an optional composition of the Point class.
Define a Variance datatype in the Util package and make all attributes of the FullCovarianceMatrix class have this Variance type (note that the units of each are strictly not the same). -
Updated: Tue, 9 Jan 2024 19:40 GMT
-
Attachments:
- EntityPayload - 2 of 2 TEX11-30.png 755 kB (image/png)
TEX11 — Entities need uncertainty information for correlation functionality
- Key: TEX11-10
- OMG Task Force: TACSIT Data Exchange (TEX) 1.1 RTF
{kind=link}